
Biomechanical inspired hand
- Nov 25, 2016
- 1 min read

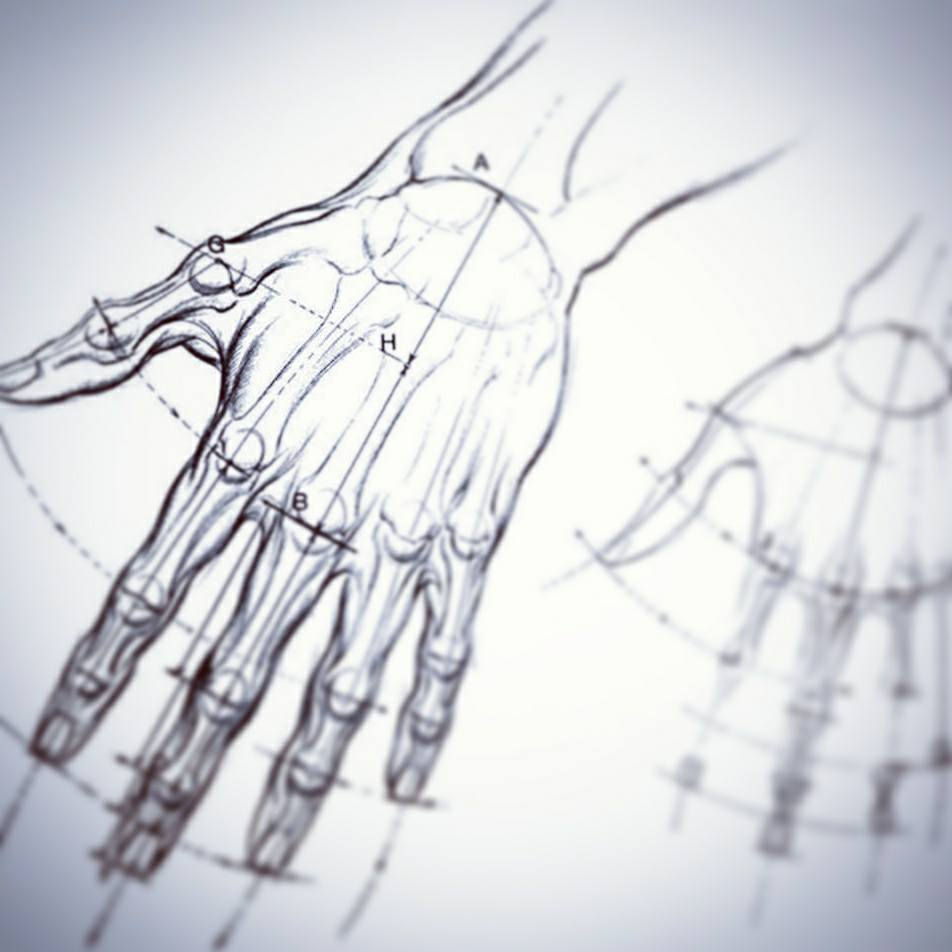
OUR GOAL In this study we want to establish not only how nature has solve problems but also why it has done it that way.Starting from the beginning is always a good place to start.We will study every part of what nature has provided and use this to produce the most lifelike hand.
Abstract- The control of the hand in primate species is characterized by a high dimensionality, due to the large number of joints in the fingers. In this study we present how nature can be used to improve how we develop future robotics, through a constraint methodology that is inspired from recent neurobiological findings.
We further develop a computational model, consisting of several inspired elements, using a co-evolutionary architecture.
Due to its neurobiological basis the methodology gives rise to a number of emergent properties that have been shown to occur in primate species during reach-to-grasp tasks. Please follow us on our journey in this exploration into the greatest lesson being taught by nature itself.



















Comments